
哈工大全媒体(阚思邈 高宇/文 高宇/图)近日,机器人技术与系统全国重点实验室刘英想教授团队在厘米级压电机器人领域取得新进展,成功研制了一种基于径向压电驱动单元周向分布的无线三足机器人,实现了厘米级机器人的平面全向运动,相关研究以《一种基于径向压电驱动单元的无线全向三足压电机器人》(Omnidirectional Motion of an Untethered Tripodal Microrobot Using Radial Piezoelectric Actuators)为题发表于《自然通讯》(Nature Communications)。该研究为厘米级机器人在复杂受限环境中的灵活作业提供了一种新的设计思路与重要技术支撑。
厘米级机器人非常契合狭小受限空间内的复杂作业需求,在生物医疗与环境探索等领域具有广阔的应用前景。压电驱动技术凭借其响应速度快、结构简单且易于小型化等优势,为厘米级机器人无线系统集成提供了新的解决方案。然而,如何在强尺寸约束下实现高效的灵活运动一直是厘米级压电机器人面临的一项重要挑战。目前主要有两种实现方法:一种是依赖两组线性解耦压电单元的协同配合,通过调整机身姿态以改变运动方向,另一种是基于多组压电单元产生切向驱动力,通过矢量合成实现全向运动。然而,前者在狭窄空间内易受到转向限制进而增加控制难度,而后者则因易产生偏转扭矩而难以保持运动轨迹稳定性。因此,亟须开发一种兼顾系统高集成度与平面灵活运动能力的厘米级压电机器人,以满足其在复杂受限环境中灵活机动与高效作业的迫切需求。
针对上述难题,团队研制了一种基于压电驱动单元周向分布的无线化全向三足压电机器人(Φ3.10×2.75cm3,重12.2克)。该机器人通过三个周向分布的压电单元合成六个半径方向的基础驱动力,结合轨迹插补算法,无需调整机身姿态即可实现平面全向移动。机器人不仅能负载13.63倍自重进行有效运动,且在经受0.6米高度跌落冲击与559倍自重静压后,依然保持良好的运动功能。此外,通过在高频连续激励与间歇激励模式切换,机器人具备了从每秒3厘米宏观速度到0.56微米微步距的跨尺度运动能力,兼顾了快速移动与高精度微观定位能力。在系统集成方面,团队利用叠层式设计,在三脚架式结构生成的底部空间内成功实现了控制、通信、传感与供电单元的厘米级高度集成,续航时间近50分钟(累计运动里程62.1米)。实验结果表明,基于所提出的点对点自主导航策略,该机器人能够实现指定轨迹自主运动与多机领航-跟随展示,并成功执行了迷宫穿越、气体泄漏检测、晶圆划痕检测、跨尺度显微观测等多项试验。此外,该机器人未来有望与微型作业单元结合,进一步提升其在狭小环境中的多机协同作业与复杂任务执行能力。
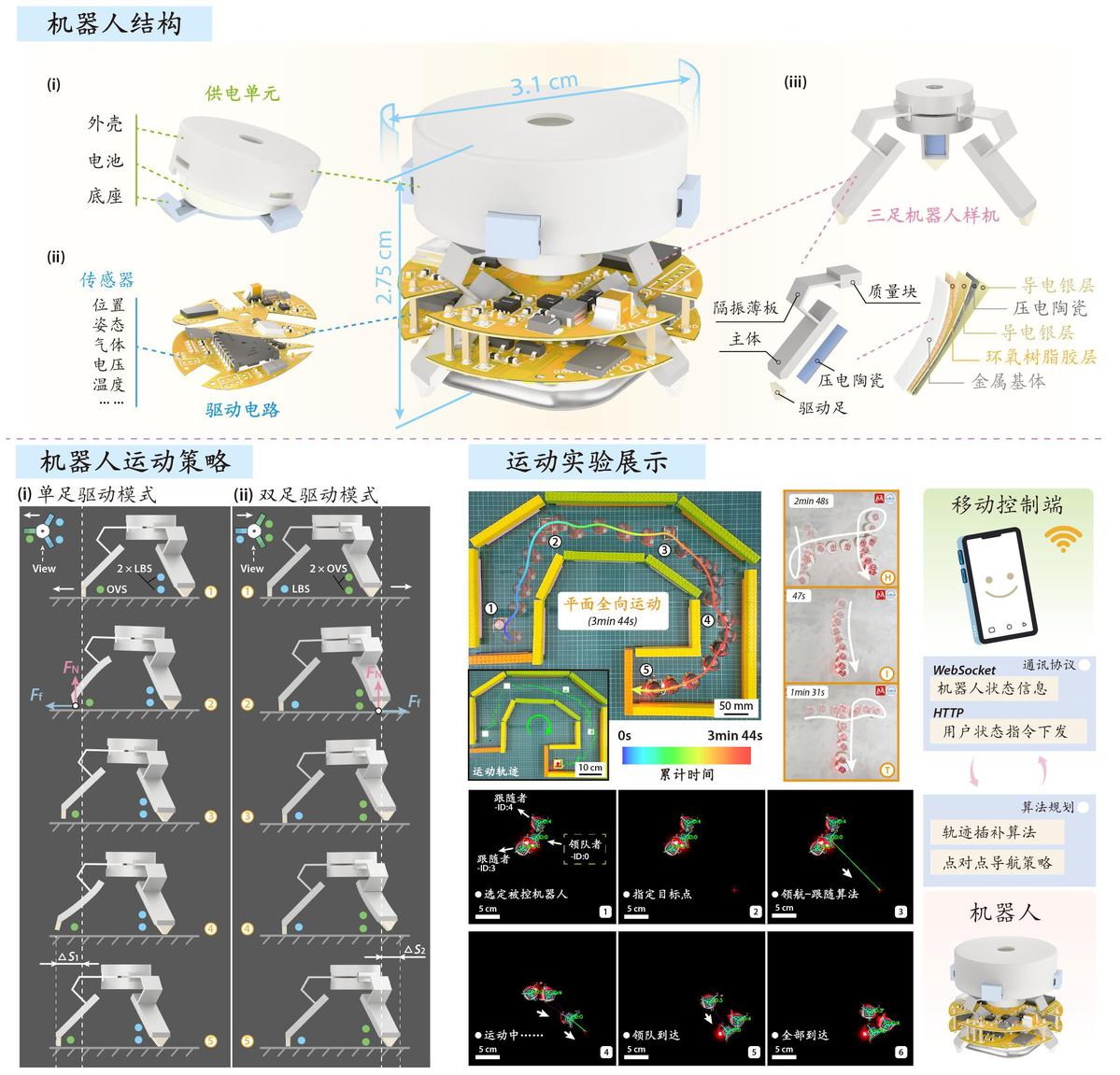
小型三足压电机器人驱动策略与实验展示
三足压电机器人结构设计与运动展示
哈工大为论文唯一完成单位与通讯单位。机器人技术与系统全国重点实验室刘英想教授和邓杰教授为论文共同通讯作者,机器人技术与系统全国重点实验室博士生高宇、副教授李京和副研究员张仕静为论文共同第一作者,机器人技术与系统全国重点实验室闫纪朋教授,硕士生张奕霖,博士生刘保熠、关景晗、王德鸿为论文共同作者。
该项工作得到国家自然科学基金、黑龙江省博士后基金、机械系统与振动全国重点实验室开放课题与中国博士后科学基金的资助。
论文链接:https://www.nature.com/articles/s41467-026-72449-x
