
一、郑研院简介
哈工大郑州研究院暨哈工大产教融合人才培养基地(郑州)是哈工大与郑州市以服务区域经济和学校发展的贡献度为导向,共同举办的具备科技研发、成果转化、产业孵化、人才培养、国际合作等综合职能的事业单位(新型研发机构)。围绕医学健康、光电融合、电子信息、智能制造、新能源、智能建造、未来技术等领域,推动河南省创新驱动、科教兴省、人才强省发展战略实施,郑州国家中心城市、国家区域科技创新中心建设。研究院坐落于风景秀丽的郑东新区龙湖北侧,总建筑面积约25万平方米,区位交通优越,服务配套完善,生态环境宜人。
研究院目前已有多支由国家级高层次、青年人才领衔的团队入驻,首批设备投入超2亿元,同在郑20余家头部企业相继开展了科技研发、研究生联培等合作。作为哈工大在郑总体牵头单位,研究院坚持以习近平总书记致哈工大建校一百周年贺信精神为引领,秉承“规格严格、功夫到家”校训,继承“大师+团队”传统和特色,依托哈工大特种环境复合材料技术、金属精密热加工、先进焊接与连接、机器人技术与系统、可调谐(气体)激光技术、极端环境营养分子的合成转化与分离技术、中俄先进能源动力技术“一带一路”等国家级实验室和航空航天轴承技术与装备、微系统与微结构制造、生物大数据、电驱动与电推进技术等省部级实验室科研资源,致力于打造中部地区最具影响力的高水平创新平台和人才高地。现竭诚欢迎海内外杰出英才加盟,共创辉煌!
二、医学健康研究院(运动康复与助残机器人系统研究领域)简介
(一)依托平台:哈工大郑州研究院、哈尔滨工业大学机器人与系统国家重点实验室
(二)研究方向:运动康复与助残机器人系统。
(三)团队情况:助老助残技术与系统研究所依托哈工大机器人技术与系统国家重点实验室,是哈尔滨工业大学“211”工程、“985”和“双一流”重点学科项目中重点建设的实验平台之一。实验室近五年承担国防科工委、“973”计划、“863”计划、国家及省市自然科学基金、企业等项目30多项,获省部级科技奖2项。在外骨骼助力机器人、仿生机器人、神经网络自生长算法、CPG建模与控制算法、基于深度强化学习的机器人控制算法等方面开展了大量工作,取得了有特色的研究成果。积累了丰富的经验与技术储备,其研究总体达到国内领先、国际先进水平。实验室拥有机器人领域团队核心成员教授1人,副教授 3人、博士后1人;具有同时培养30-40名研究生的能力(目前,实验室在读博士研究生16人,硕士研究生15人)。近五年,发表机器人领域高水平论文100余篇,其中,SCI检索60余篇,EI检索论文40余篇,申请发明专利20余项,其中授权发明专利10余项。
(四)研究成果、产品:
团队先期完成了通用作业型和负重行走型两代外骨骼助力机器人样机;形成了一套通用的人机耦合系统构型的设计理念和方法,建立人机连接的物理基础,实现了人机之间的运动信息共享和能量耦合,解决载荷传递和运动干涉等问题;提出了基于人体逆动力学模型的人体运动意图解算方法,可实现动态求解,获得的运动意图超前于人体的动作,据此实现了“主动助力”;基于人体能量流动特性分析,提出了将关节做功通过遗传算法自动寻优解耦成主动驱动、弹性驱动、阻尼驱动,利用固有的低能耗特性的弹性、阻力元件替代主动驱动元件,显著降低关节能耗。
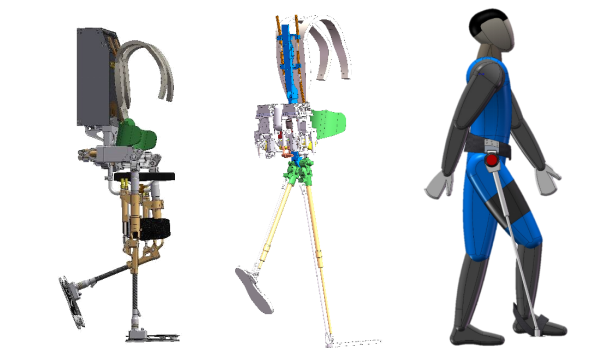
从左至右依次为通用作业型、负重行走型、助残康复型
(五)建设目标
5年内工作目标:
1.完成助力行走机器人、康复训练机器人系统机理研究、样机制作及产品化,推动瘫痪患者助行领域内新理论、新方法以及新技术的发展,抢占知识产权,寻求与企业的合作,陆续形成标准化、模块化、系列化产品,并由逐渐推广至医疗、助残、康复等领域。申请专利20项。
2.初步实现基于脑电信号的运动意识解析及验证,探索基于经皮肌肉电刺激重建偏瘫患侧肢体运动。发表高水平学术论文(SCI/EI )20篇;
10年内工作目标:
1.模拟患者受损的脑运动神经,实现将运动意识编码成为步态运动中多肌群协同动作的运动指令,使患肢准确执行来自运动神经模型的运动指令,实现步态运动。总结形成“基于脑运动功能重塑的运动康复”新方法、新理论。
2.形成系列产业化成果,包括外骨骼被动训练装置、 MES理疗设备、外骨骼型MES有感训练、助力与代偿装备、基于EMG和自体肌肉的脑控增强系统、 基于植入式神经电极的神经搭桥 NMES系统,最终实现植入式神经控制器解决脑卒中瘫痪问题。
三、负责人介绍

李满天,哈尔滨工业大学机电学院副教授、博士生导师,主要从事仿生机器、移动机器人的研发。特种机器人标委会委员、中国宇航学会机器人分会会员、中国指挥控制学会无人系统分会会员。发表论文50余篇,其中SCI检索15篇、EI检索36篇。获得国家发明专利18项。获得黑龙江省科技进步二等奖1项、中国人民武装警察部队技术发明二等奖1项、国家教学成果二等奖1项。承担国防973项目课题1项、国家自然科学基金项目2项,国家863计划项目4项,国防基础科研项目2项,参加国家自然科学基金项目4项、863计划项目3项,横向项目5项。
四、招聘研究方向
1.有感运动康复训练机理方向;
2.感知、认知、控制及运动的人机交互技术方向;
3.运动神经信号的解析与合成研究方向;
4.助老助残机器人方向。
五、招聘岗位
(一)领军人才
申报条件:在学术前沿领域取得国际同行公认的高水平原创性研究成果,国家级高层次人才计划入选者、国家级科技奖励一等奖主要完成人、国家级科研平台负责人、国家级重大项目(团队)负责人/首席科学家以及相当于上述水平人才。年龄原则上不超过50周岁。
(二)卓越人才
申报条件:具有良好的创新发展潜力和国际化学术视野,国家级青年人才计划入选者、国家级科技奖励二等奖主要完成人、国家级科研平台相关负责人、国家级重点项目(团队)负责人/首席科学家以及相当于上述水平人才。年龄原则上不超过40周岁。
(三)拔尖人才
申报条件:水平居于本学科领域同年龄段学者前列,具有冲击国家级青年人才计划潜力的青年拔尖人才(以及相当于上述水平人才),年龄原则上不超过35周岁。
(四)研究员系列岗位
申报条件:一般应具有博士学位,身心健康,学术水平原则上已达到哈工大正高、副高、中级岗位申报基本要求或达到同层次高校院所对应岗位申报基本要求,研究员年龄原则上不超过40周岁,副研究员年龄原则上不超过35周岁,获聘后可全职到岗长期稳定工作。
1. 研究员A档/ B档
申报条件:
(1)已获得博士学位,身心健康,具有良好的学术道德,年龄原则上不超过40周岁,可全职到岗长期稳定工作。
(2)海内外著名大学、研究机构在(出)站博士后且学术水平已基本达到国内知名高校、科研院所正高级岗位相当层次者可申请此岗位。
2. 副研究员A档/ B档
申报条件:
(1)已获得博士学位,身心健康,具有良好的学术道德,年龄原则上不超过35周岁,可全职到岗长期稳定工作。
(2)海内外著名大学、研究机构毕业的博士、在(出)站博士后且学术水平已基本达到国内知名高校、科研院所副高级岗位相当层次者可申请此岗位。
(五)优秀/常规博士后
申报条件:
(1)海内外知名大学博士毕业生(近三年内毕业或半年内可获得博士学位),身心健康,具有良好的学术道德,优秀博士后年龄原则上不超过32周岁,常规博士后年龄原则上不超过35周岁。
(2)立志从事科学研究,具有扎实的专业基础知识,掌握相关研究领域实验技术,逻辑思维严谨,能够吃苦耐劳,有较强的自我学习能力、独立科研能力、组织协调能力及团队合作精神。
(3)具有良好的英文沟通、阅读和写作能力,能独立申报中国博士后科学基金、国家自然科学基金青年基金等项目。
(4)具有机器人、人体运动功能康复、助老助残装备等相关专业及交叉学科背景者,或具备相关项目申报、实施经历者优先考虑。
博士后合作导师信息 | |||
导师姓名 | 合作研究方向 | 个人主页 | 邮箱 |
李满天 | 康复与助残机器人 | — | limt@hit.edu.cn |
六、薪酬待遇及支持条件
(一)年薪、科研保障及安家支持
哈工大郑州研究院将为入职者提供富有竞争力的、能够使其安心学术的年薪、安家费、科研启动经费待遇(http://zri.hit.edu.cn/2023/0510/c18160a306204/page.htm),同时,将视引进人才的实际科研工作需要,在实验室空间、团队配备、研究生招生指标等方面给予充分支持。
(二)其他待遇
哈工大郑州研究院将协助入职者申请人才公寓、省市人才奖补,协助解决子女入学入托问题,为引进人才解决后顾之忧。
七、应聘方式
请应聘者将个人详细简历发送至36804669@qq.com并抄送至研究院人才办公室官方邮箱talents_hitzri@hit.edu.cn。邮件主题请按照“申报岗位+姓名+研究方向+二级机构名称”格式命名,例如“常规博士后+张三+运动康复与助残机器人系统方向+医学健康研究院(运动康复与助残机器人系统研究领域)”。
联系人:王鹏飞老师
联系电话:18904518766
地址:河南省郑州市郑东新区龙源东七街26号
编辑:徐思佳,审核:田晨
