哈工大全媒体(阚思邈 高祥/文 高祥/图)近日,机器人技术与系统全国重点实验室刘英想教授团队在压电机器人操控器研究方面取得新进展,成功研制出一种用于血管精准穿刺的新型压电机器人操控器。相关研究以《一种面向生物体精细穿刺的二维跨尺度压电机器人操控器》(A Compact 2-DOF Cross-Scale Piezoelectric Robotic Manipulator with Adjustable Force for Biological Delicate Puncture)为题发表在《IEEE机器人学汇刊》(IEEE Transactions on Robotics)上。这一研究成果为机器人操控器多自由度、大工作范围、高精度及大穿刺力的兼备提供一种有效解决思路,在细胞和血管等生物体微穿刺领域具备了应用潜力。
生物体微操作是生物医学工程领域的一项共性支撑技术,也是机器人技术的重要应用方向。常见的生物体微操作包括微定位、微夹取、微穿刺和微注射等,其中以细胞和血管等生物体微穿刺最具挑战。随着穿刺对象逐渐由“大尺寸”“规则形状”向“小体积”“复杂形态”发展,对机器人操控器的多项技术指标均提出了苛刻需求。现有机器人操控器受结构、致动元件和驱动方法的限制,在维度、尺度、精度、力度、电磁兼容性和结构紧凑性等方面存在诸多局限。因此,面向细胞和血管等生物体的精细穿刺需求,如何研制出多性能兼备的机器人操控器成为本领域的重大挑战之一。
针对上述问题,团队分析了现有各类机器人操控器的设计方法、结构特征、驱动模式和性能参数,提出了一种基于“单驱动器+双模块+多维轨迹”驱动圆柱型动子实现二维直线-旋转运动的设计思想,并基于该思想设计了一种压电机器人操控器的新构型。该操控器的压电驱动模块采用多柔性铰链与纵-弯-弯压电致动元件融合设计策略,实现了致动元件的运动转换和驱动模块的三维轨迹解耦输出;通过压电驱动模块、压电锁止模块与光轴的集成设计,实现了操控器的紧凑结构和穿刺力的精准可调。团队进一步提出了一种双足多维轨迹协同步进的驱动方法,实现了操控器无回退的二维跨尺度运动,并基于理论分析和有限元仿真方法研究了关键结构参数对位移响应和穿刺力的影响规律。为了验证相关设计和方法的可行性,团队研制了压电机器人操控器样机,实验结果表明,该操控器直线和旋转运动范围分别为38.5毫米和360度,位移分辨力为48纳米和0.38微弧度,穿刺力范围为1.70毫牛~301.34毫牛,穿刺力分辨率为0.13毫牛,解决了现有机器人操控器难以实现多自由度、大工作行程、高精度和大穿刺力兼备的难题。
此外,团队还研制了一款专用手持控制器,并基于团队前期自研的六维压电平台构建了一套机器人精细穿刺系统。试验结果表明,团队所研发的机器人操控器在不同穿刺力下成功完成了4种尺寸百微米级直状硅胶血管的穿刺任务,并在300毫牛穿刺力下实现了外径780微米弯曲状硅胶血管的精准穿刺。相关结果表明,该型操控器可为不同尺寸、不同形态的细胞或血管等生物体精细穿刺提供一种新选择。
哈工大为论文唯一完成单位与通讯单位。机电工程学院博士研究生高祥和邓杰副教授为论文共同第一作者,刘英想教授和张仕静副研究员为论文共同通讯作者,博士研究生王玮亦、常庆兵、孙建华和刘军考教授为论文共同作者。
该项研究工作得到了国家自然科学基金等课题的资助。
论文链接:https://ieeexplore.ieee.org/document/10682496
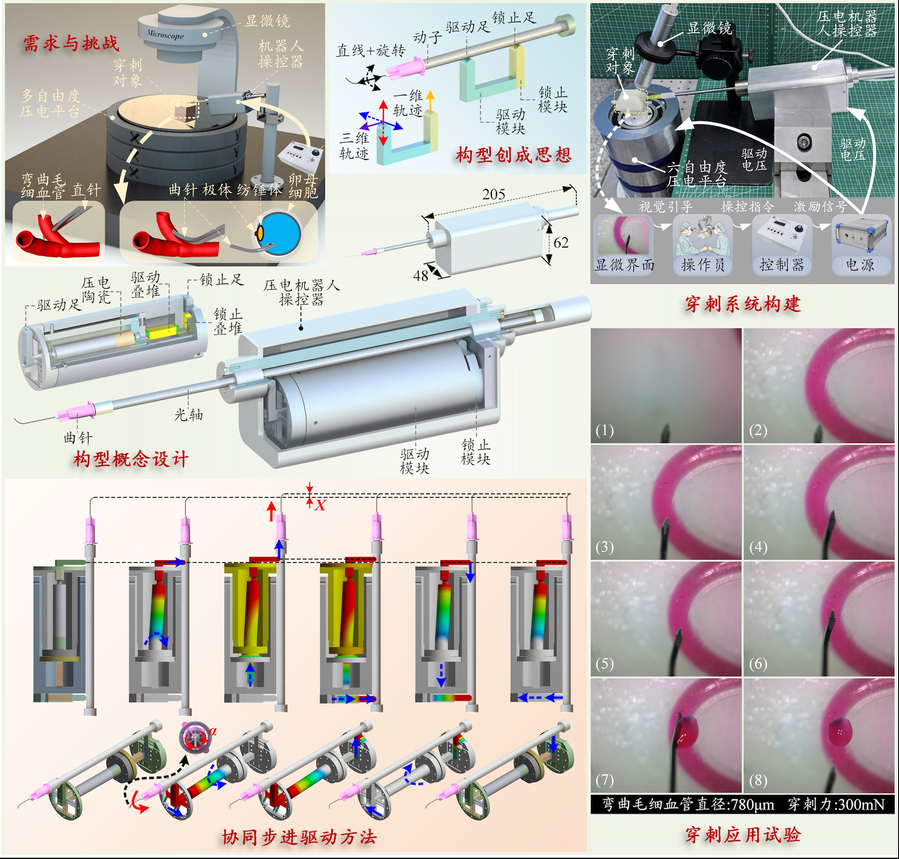
压电机器人操控器的构型、驱动方法、系统构建与应用实验